Subsections of Sorting
Select Sorts
Select Sorts
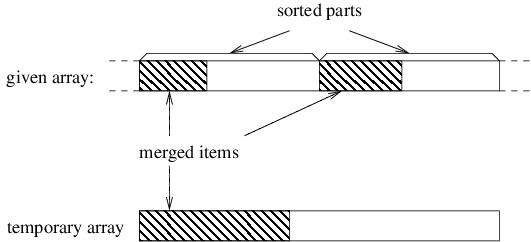
A select sort operates by repeatedly selecting the smallest data element
of an unsorted portion of the array and moving it to the end of a sorted
portion. Thus, at each step, the data items will be arranged into two
parts:
- A sorted part; and
- An unsorted part in which each element is at least as large as all
elements in the sorted part.
The following figure illustrates this arrangement.

Initially, the sorted part will be empty. At each step, the unsorted
part is rearranged so that its smallest element comes first. As a
result, the sorted part can now contain one more element, and the
unsorted part one fewer element. After $ n - 1 $ steps, where $ n $ is
the number of elements in the array, the sorted part will have all but
one of the elements. Because the one element in the unsorted part must
be at least as large as all elements in the sorted part, the entire
array will be sorted at this point.
The approach outlined above can be implemented in various ways. The main
difference in these implementations is in how we rearrange the unsorted
part to bring its smallest element to the beginning of that part. The
most straightforward way to do this is to find the smallest element in
this part, then swap it with the first element in this part. The
resulting algorithm is called selection sort. It requires nested
loops. The outer loop index keeps track of how many elements are in the
sorted part. The unsorted part then begins at this index. The inner loop
is responsible for finding the smallest element in the unsorted part.
Once the inner loop has finished, the smallest element is swapped with
the first element in the unsorted part.
Note that the inner loop in selection sort iterates once for every
element in the unsorted part. On the first iteration of the outer loop,
the unsorted part contains all $ n $ elements. On each successive
iteration, the unsorted part is one element smaller, until on the last
iteration, it has only $ 2 $ elements. If we add up all these values, we
find that the inner loop iterates a total of exactly
$ (n - 1)(n + 2)/2 $ times. This value is
proportional to $ n^2 $ as $ n $ increases; hence, the running
time of the algorithm is in $ O(n^2) $. Furthermore, this
performance occurs no matter how the data items are initially arranged.
As we will see in what follows, $ O(n^2) $ performance is not
very good if we want to sort a moderately large data set. For example,
sorting $ 100,000 $ elements will require about $ 5 $ billion iterations of the
inner loop. On the positive side, the only time data items are moved is
when a swap is made at the end of the outer loop; hence, this number is
proportional to $ n $. This could be advantageous if we are sorting large
value types, as we would not need to write these large data elements
very many times. However, for general performance reasons, large data
types shouldn’t be value types — they should be reference types to avoid
unnecessary copying of the values. For this reason, selection sort isn’t
a particularly good sorting algorithm.
Performance issues aside, however, there is
one positive aspect to selection sort. This aspect has to do with
sorting by keys. Consider, for example, the rows of a spreadsheet. We
often want to sort these rows by the values in a specific column. These
values are the sort keys of the elements. In such a scenario, it is
possible that two data elements are different, but their sort keys are
the same. A sorting algorithm might reverse the order of these elements,
or it might leave their order the unchanged. In some cases, it is
advantageous for a sorting algorithm to leave the order of these
elements unchanged. For example, if we sort first by a secondary key,
then by a primary key, we would like for elements whose primary keys are
equal to remain sorted by their secondary key. Therefore, a sorting
algorithm that always maintains the original order of equal keys is said
to be stable. If we are careful how we implement the inner loop of
selection sort so that we always select the first instance of the
smallest key, then this algorithm is stable.
Another implementation of a select sort
is bubble sort. It rearranges the unsorted part by swapping adjacent
elements that are out of order. It starts with the last two elements
(i.e., the elements at locations $ n - 1 $ and $ n - 2 $), then
the elements at locations $ n - 2 $ and $ n - 3 $, etc.
Proceeding in this way, the smallest element in the unsorted part will
end up at the beginning of the unsorted part. While the inner loop is
doing this, it keeps track of whether it has made any swaps. If the loop
completes without having made any swaps, then the array is sorted, and
the algorithm therefore stops.
Like selection sort, bubble sort is stable. In the worst case, however,
the performance of bubble sort is even worse than that of selection
sort. It is still in $ O(n^2) $, but in the worst case, its
inner loop performs the same number of iterations, but does a lot more
swaps. Bubble sort does outperform selection sort on some inputs, but
describing when this will occur isn’t easy. For example, in an array in
which the largest element occurs in the first location, and the
remaining locations are sorted, the performance ends up being about the
same as selection sort — even though this array is nearly sorted. Like
selection sort, it is best to avoid bubble sort.
A select sort that significantly
outperforms selection sort is known as heap sort. This algorithm is
based on the idea that a priority queue can be used to sort data — we
first place all items in a priority queue, using the values themselves
as priorities (if we are sorting by keys, then we use the keys as
priorities). We then repeatedly remove the element with largest
priority, filling the array from back to front with these elements.
We can optimize the above algorithm by using a priority queue
implementation called a binary heap, whose implementation details we
will only sketch. The basic idea is that we can form a binary tree from
the elements of an array by using their locations in the array. The
first element is the root, its children are the next two elements, their
children are the next four elements, etc. Given an array location, we
can then compute the locations of its parent and both of its children.
The priorities are arranged so that the root of each subtree contains
the maximum priority in that subtree. It is possible to arrange the
elements of an array into a binary heap in $ O(n) $ time, and to remove
an element with maximum priority in $ O(\lg n) $ time.
Heap sort then works by pre-processing the array to arrange it into a
binary heap. The binary heap then forms the unsorted part, and it is
followed by the sorted part, whose elements are all no smaller than any
element in the unsorted part. While this arrangement is slightly
different from the arrangement for the first two select sorts, the idea
is the same. To rearrange the unsorted part, it:
- Copies the first (i.e., highest-priority) element to a temporary
variable.
- Removes the element with maximum priority (i.e., the first element).
- Places the copy of the first element into the space vacated by its
removal at the beginning of the sorted part.
Heap sort runs in $ O(n \lg n) $ time in the worst case.
Information theory can be used to prove that any sorting algorithm that
sorts by comparing elements must make at least $ \lg(n!) $ comparisons on
some arrays of size $ n $. Because $ \lg(n!) $ is proportional to
$ n \lg n $, we cannot hope to do any better than
$ O(n \lg n) $ in the worst case. While this performance is a
significant improvement over selection sort and bubble sort, we will see
in later that
there is are algorithms that do even better in practice.
Furthermore, heap sort is not stable.
On the other hand, we will also see that heap sort is an important component of an efficient hybrid
algorithm. This algorithm is one of the best general-purpose sorting algorithms; in fact, it is used by .NET’s Array.Sort method. We
will examine this approach in “Hybrid
Sorts”.
Insert Sorts
Insert Sorts
An insert sort operates by repeatedly inserting an element into a sorted
portion of the array. Thus, as for select sorts, at each step the data
items will be arranged into a sorted part, followed by an unsorted part;
however, for insert sorts, there is no restriction on how elements in
the unsorted part compare to elements in the sorted part. The following
figure illustrates this arrangement.

Initially, the sorted part will contain the first element, as a single
element is always sorted. At each step, the first element in the
unsorted part is inserted into its proper location in the sorted part.
As a result, the sorted part now contains one more element, and the
unsorted part one fewer element. After $ n - 1 $ steps, where $ n $ is
the number of elements in the array, the sorted part will contain all
the elements, and the algorithm will be done.
Again, this approach can be implemented in various ways. The main
difference in these implementations is in how we insert an element. The
most straightforward way is as follows:
- Copy the first element of the unsorted part to a temporary variable.
- Iterate from the location of the first element of the unsorted part
toward the front of the array as long as we are at an index greater
than 0 and the element to the left of the current index is greater
than the element in the temporary variable. On each iteration:
- Copy the element to the left of the current index to the current
index.
- Place the value in the temporary variable into the location at which
the above loop stopped.
The algorithm that uses the above insertion technique is known as
insertion sort. Like selection sort, it requires an outer loop to keep
track of the number of elements in the sorted part. Each iteration of
this outer loop performs the above insertion algorithm. It is not hard
to see that this algorithm is
stable.
The main advantage insertion sort has over selection
sort is that the inner
loop only iterates as long as necessary to find the insertion point. In
the worst case, it will iterate over the entire sorted part. In this
case, the number of iterations is the same as for selection sort; hence,
the worst-case running time is in $ O(n^2) $ — the same as
selection sort and bubble
sort. At the other
extreme, however, if the array is already sorted, the inner loop won’t
need to iterate at all. In this case, the running time is in $ O(n) $,
which is the same as the running time of bubble sort on an array that is
already sorted.
Unlike bubble sort, however, insertion sort has a clean characterization
of its performance based on how sorted the array is. This
characterization is based on the notion of an inversion, which is a
pair of array locations $ i \lt j $ such that the value at location
$ i $ is greater than the value at location $ j $; i.e., these two values
are out of order with respect to each other. A sorted array has no
inversions, whereas in an array of distinct elements in reverse order, every pair of
locations is an inversion, for a total of $ n(n - 1)/2 $
inversions. In general, we can say that the fewer inversions an array
has, the more sorted it is.
The reason why inversions are important to understanding the performance
of insertion sort is that each iteration of the inner loop (i.e., step 2
of the insertion algorithm above) removes exactly one inversion.
Consequently, if an array initially has $ k $ inversions, the inner loop
will iterate a total of $ k $ times. If we combine this with the
$ n - 1 $ iterations of the outer loop, we can conclude that
the running time of insertion sort is in $ O(n + k) $. Thus, if
the number of inversions is relatively small in comparison to $ n $ (i.e.,
the array is nearly sorted), insertion sort runs in $ O(n) $ time. (By
contrast, $ n - 2 $ inversions can be enough to cause the inner loop
of bubble sort to iterate its worst-case number of times.) For this
reason, insertion sort is the algorithm of choice when we expect the
data to be nearly sorted — a scenario that occurs frequently in
practice. This fact is exploited by an efficient hybrid algorithm that
combines insertion sort with two other sorting algorithms - see “Hybrid
Sorting Algorithms” for more
details.
Before we consider another insert sort, there is one other advantage to
insertion sort that we need to consider. Because the algorithm is simple
(like selection sort and bubble sort), it performs well on small arrays.
More complex algorithms like heap
sort, while providing much
better worst-case performance for larger arrays, don’t tend to perform
as well on small arrays. In many cases, the performance difference on
small arrays isn’t enough to matter, as pretty much any algorithm will
perform reasonably well on a small array. However, this performance
difference can become significant if we need to sort many small arrays
(in a later section, we will see an application in which this scenario
occurs). Because insertion sort tends to out-perform both selection sort
and bubble sort, it is usually the best choice when sorting small
arrays.
Another way to implement an insert sort is
to use a balanced binary search tree, such as an AVL
tree, to store the sorted
part. In order to do this, we need to modify the definition of a binary
search tree to allow
multiple instances of the same key. In order to achieve stability, if we
are inserting a key that is equal to a key already in the tree, we would
treat the new key as being greater than the pre-existing key - i.e., we
would recursively insert it into the right child. Once all the data
items are inserted, we would then copy them back into the array in
sorted order using an inorder
traversal. We call
this algorithm tree sort.
This algorithm doesn’t exactly match the above description of an insert
sort, but it is not hard to see that it follows the same general
principles. While the sorted portion is not a part of the array, but
instead is a separate data structure, it does hold an initial part of
the array in sorted order, and successive elements from the unsorted
portion are inserted into it.
Because insertions into an AVL tree containing $ k $ elements can be done
in $ O(\lg k) $ time in the worst case, and because an inorder traversal
can be done in $ O(k) $ time, it follows that tree sort runs in $O(n
\lg n)$ time in the worst case, where $ n $ is the number of elements in
the array. However, because maintaining an AVL tree requires more
overhead than maintaining a binary heap, heap sort tends to give better
performance in practice. For this reason, tree sort is rarely used.
Merge Sorts
Merge Sorts
A merge sort works by merging together two sorted parts of an array.
Thus, we should focus our attention on an array that is partitioned into
two sorted parts, as shown in the following figure.

The different ways of implementing a merge sort depend both on how the
above arrangement is achieved, and also on how the two parts are merged
together. The simplest implementation is an algorithm simply called
merge sort.
Merge sort uses recursion to arrange the array into two sorted parts. In
order to use recursion, we need to express our algorithm, not in terms
of sorting an array, but instead in terms of sorting a part of an array.
If the part we are sorting has more than one element, then we can split
it into two smaller parts of roughly equal size (if it doesn’t have more
than one element, it is already sorted). Because both parts are smaller,
we can recursively sort them to achieve the arrangement shown above.
The more complicated step in merge sort is merging the two sorted parts
into one. While it is possible to do this without using another array
(or other data structure), doing so is quite complicated. Merge sort
takes a much simpler approach that uses a temporary array whose size is
the sum of the sizes of the two sorted parts combined. It first
accumulates the data items into the new array in sorted order, then
copies them back into the original array.
In order to understand how the merging works, let’s consider a snapshot
of an arbitrary step of the algorithm. If we’ve accumulated an initial
portion of the result, these elements will be the smallest ones. Because
both of the parts we are merging are sorted, these smallest elements
must come from initial portions of these two parts, as shown below.
Initially, the three shaded areas above are all empty. In order to
proceed, we need local variables to keep track of the first index in
each of the three unshaded areas. We then iterate as long as both of
the unshaded areas are nonempty. On each iteration, we want to place the
next element into the temporary array. This element needs to be the
smallest of the unmerged elements. Because both parts of the given array
are sorted, the smallest unmerged element will be the first element from
one of the two unshaded parts of this array — whichever one is smaller
(for stability, we use the first if they are equal). We copy that
element to the beginning of the unshaded portion of the temporary array,
then update the local variables to reflect that we have another merged
item.
The above loop will terminate as soon as we have merged all the data
items from one of the two sorted parts; however, the other sorted part
will still contain unmerged items. To finish merging to the temporary
array, we just need to copy the remaining items to the temporary array.
We can do this by first copying all remaining items from the first
sorted part, then copying all remaining items from the second sorted
part (one of these two copies will copy nothing because there will be no
remaining items in one of the two sorted parts). Once all items have
been merged into the temporary array, we copy all items back to the
original array to complete the merge.
We won’t do a running time analysis here, but merge sort runs in $ O(n \lg n) $ time in the worst case. Furthermore, unlike heap
sort, it is stable.
Because it tends to perform better in practice than tree
sort, it is a better
choice when we need a stable sorting algorithm. In fact, it is the basis
(along with insertion
sort) of a stable
hybrid sorting algorithm that performs very well in practice. This
algorithm, called Tim sort, is rather complicated; hence, we won’t
describe it here. If we don’t need a stable sorting algorithm, though,
there are other alternatives, as we shall see in the next two sections.
Another scenario in which a merge sort is
appropriate occurs when we have a huge data set that will not fit into
an array. In order to sort such a data set, we need to keep most of the
data in files while keeping a relatively small amount within internal
data structures at any given time. Because merging processes data items
sequentially, it works well with files. There are several variations on
how we might do this, but the basic algorithm is called external merge
sort.
External merge sort uses four temporary files in addition to an input
file and an output file. Each of these files will alternate between
being used for input and being used for output. Furthermore, at any
given time, one of the two files being used for input will be designated
as the first input file, and the other will designated as the second
input file. Similarly, at any given time, one of the two files being
used for output will be designated as the current output file, and the
other will be designated as the alternate output file.
The algorithm begins with an initialization step that uses the given
unsorted data file as its input, and two of the temporary files as its
output. We will need two variables storing references to the current
output file and the alternate output file, respectively. At this point
we begin a loop that iterates until we reach the end of the input. Each
iteration of this loop does the following:
- Fill a large array with data items from the input (if there aren’t
enough items to fill this array, we just use part of it).
- Sort this array using whatever sorting algorithm is appropriate.
- Write each element of the sorted array to the current output file.
- Write a special end marker to the output file.
- Swap the contents of the variables referring to the current output
file and the alternate output file.
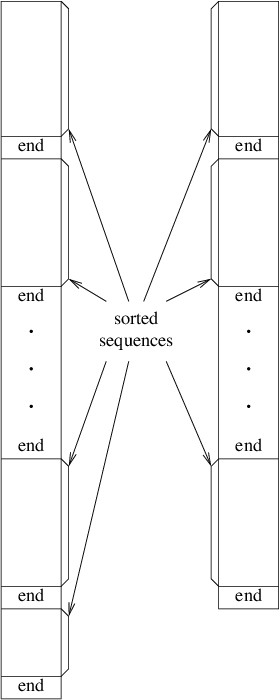
After the above loop terminates, the two output files are closed. Thus,
the initialization writes several sorted sequences, each terminated by
end markers, to the two output files. Furthermore, either the two output
files will contain the same number of sorted sequences or the one that
was written to first will contain one more sorted sequence than the
other. The following figure illustrates these two files.
The algorithm then enters the main loop. Initially the output file first
written in the initialization is designated as the first input file, and
the other file written in the initialization is designated as the second
input file. The other two temporary files are arbitrarily designated as
the current output file and the alternate output file. The loop then
iterates as long as the second input file is nonempty. Each iteration
does the following:
- While there is data remaining in the second input file:
- Merge the next sorted sequence in the first input file with the
next sorted sequence in the second input file, writing the
result to the current output file (see below for details).
- Write an end marker to the current output file.
- Swap the current output file and the alternate output file.
- If there is data remaining in the first input file:
- Copy the remaining data from the first input file to the current
output file
- Write an end marker to the current output file.
- Swap the current output file and the alternate output file.
- Close all four temporary files.
- Swap the first input file with the alternate output file.
- Swap the second input file with the current output file.
Each iteration therefore combines pairs of sorted sequences from the two
input files, thus reducing the number of sorted sequences by about half.
Because it alternates between the two output files, as was done in the
initialization, either the two output files will end up with the same
number of sequences, or the last one written (which will be the
alternate output file following step 2) will have one more than the
other. The last two steps therefore ensure that to begin the next
iteration, if the the number of sequences in the two input files is
different, the first input file has the extra sequence.
The loop described above finishes when the second input file is empty.
Because the first input file will have no more than one more sorted
sequence than the second input file, at the conclusion of the loop, it
will contain a single sorted sequence followed by an end marker. The
algorithm therefore concludes by copying the data from this file, minus
the end marker, to the output file.
Let’s now consider more carefully the merge done in step 1a above. This
merge is done in essentially the same way that the merge is done in the
original merge sort; however, we don’t need to read in the entire sorted
sequences to do it. Instead, all we need is the next item from each
sequence. At each step, we write the smaller of the two, then read the
next item from the appropriate input file. Because we only need these
two data items at any time, this merge can handle arbitrarily long
sequences.
For an external sorting algorithm, the most important measure of
performance is the number of file I/O operations it requires, as these
operations are often much more expensive than any other (depending, of
course, on the storage medium). Suppose the initial input file has $ n $
data items, and suppose the array we use in the initialization step can
hold $ m $ data items. Then the number of sorted sequences written by the
initialization is $ n/m $, with any fractional part rounded up. Each
iteration of the main loop then reduces the number of sorted sequences
by half, with any fractional part again rounded up. The total number of
iterations of the main loop is therefore $ \lg (n/m) $, rounding
upward again. Each iteration of this loop makes one pass through the
entire data set. In addition, the initialization makes one pass, and the
final copying makes one pass. The total number of passes through the
data is therefore $ \lg (n/m) + 2 $. For example, if we are
sorting $ 10 $ billion data items using an array of size $ 1 $ million, we need
$ \lg 10,000 + 2 $ passes, rounded up; i.e., we need $ 16 $ passes
through the data.
Various improvements can be made to reduce the number of passes through
the data. For example, we can avoid the final file copy if we use
another mechanism for denoting the end of a sorted sequence. One
alternative is to keep track of the length of each sequence in each file
in a List<long>. If the temporary files are within the same
directory as the output file, we can finish the sort by simply renaming
the first input file, rather than copying it.
A more substantial improvement involves using more temporary files.
$ k $-way external merge sort uses $ k $ input and $ k $ output files. Each
merge then merges $ k $ sorted sequences into $ 1 $. This reduces the number
of iterations of the main loop to $ \log_k (n/m) $. Using
the fact that
$ \log_{k^2} n = (\log_k n)/2 $,
we can conclude that squaring $ k $ will reduce the number of passes
through the data by about half. Thus, $ 4 $-way external merge sort will
make about half as many passes through the data as $ 2 $-way external merge
sort. The gain diminishes quickly after that, however, as we must
increase $ k $ to $ 16 $ to cut the number of passes in half again.
Split Sorts
Split Sorts
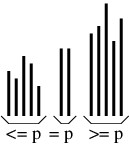
A split sort operates by splitting the array into three parts:
- An unsorted part containing elements less than or equal to some
pivot element p.
- A nonempty part containing elements equal to p.
- An unsorted part containing elements greater than or equal to p.
This arrangement is illustrated in the following figure.
To complete the sort, it then sorts the two unsorted parts. Note that
because the second part is nonempty, each of the two unsorted parts is
smaller than the original data set; hence, the algorithm will always
make progress.
The various implementations of a split sort are collectively known as
quick sort. They differ in how many elements are placed in the middle
part (only one element or all elements equal to the pivot), how the
pivot is chosen, how the elements are partitioned into three parts, and
how the two sub-problems are sorted. We will examine only two
variations, which differ in how the pivot element is chosen.
Let’s start with how we do the partitioning. Let p denote the pivot
element. Because most of the split sort implementations use recursion to
complete the sort, we’ll assume that we are sorting a portion of an
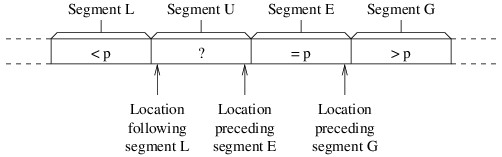
array. At each stage of the partitioning, the array portion we are
sorting will be arranged into the following four segments:
- Segment L: Elements less than p.
- Segment U: Elements we haven’t yet examined (i.e., unknown
elements).
- Segment E: Elements equal to p.
- Segment G: Elements greater than p.
Initially, segments L, E, and G will be empty, and each iteration will
reduce the size of segment U. The partitioning will be finished when
segment U is empty. We will need three local variables to keep track of
where one segment ends and another segment begins, as shown in the
following figure:
We have worded the descriptions of the three local variables so that
they make sense even if some of the segments are empty. Thus, because
all segments except U are initially empty, the location following
segment L will initially be the first location in the array portion that
we are sorting, and the other two variables will initially be the last
location in this portion. We then need a loop that iterates as long as
segment U is nonempty — i.e., as long as the location following segment
L is no greater than the location preceding segment E. Each iteration of
this loop will compare the last element in segment U (i.e., the element
at the location preceding segment E) with p. We will swap this element
with another depending on how it compares with p:
- If it is less than p, we swap it with the element following
segment L, and adjust the end of segment L to include it.
- If it is equal to p, we leave it where it is, and adjust the
beginning of segment E to include it.
- If it is greater than p, we swap it with the element preceding
segment G, adjust the beginning of segment G to include it, and
adjust the beginning of segment E to account for the fact that we
are shifting this segment to the left by 1.
Once this loop completes, the partitioning will be done. Furthermore, we
can determine the two parts that need to be sorted from the final values
of the local variables.
The first split sort implementation we will consider is fairly
straightforward, given the above partitioning scheme. If we are sorting
more than one element (otherwise, there is nothing to do), we will use
as the pivot element the first element of the array portion to be
sorted. After partitioning, we then sort the elements less than the
pivot using a recursive call, and sort the elements greater than the
pivot with another.
Though we won’t give an analysis here, the above algorithm runs in
$ O(n^2) $ time in the worst case, where $ n $ is the number of
elements being sorted. However, as we saw with insertion
sort, the worst-case
running time doesn’t always tell the whole story. Specifically, the
expected running time of quick sort (this implementation and others) on
random arrays is in $ O(n \lg n) $.
However, we don’t often need to sort random data. Let’s therefore take a
closer look at what makes the worst case bad. In some ways this
algorithm is like merge sort — it does two recursive calls, and the
additional work is proportional to the number of elements being sorted.
The difference is that the recursive calls in merge sort are both on
array portions that are about half the size of the portion being sorted.
With this quick sort implementation, on the other hand, the sizes of the
recursive calls depend on how the first element (i.e., the pivot
element) compares to the other elements. The more elements that end up
in one recursive call, the slower the algorithm becomes. Consequently,
the worst case occurs when the array is already sorted, and is still bad
if the array is nearly sorted. For this reason, this is a particularly
bad implementation.
Before we look at how we can improve the performance, we need to
consider one other aspect of this implementation’s performance. For a
recursive method, the amount of data pushed on the runtime stack is
proportional to the depth of the recursion. In the worst cases (i.e., on
a sorted array), the recursion depth is $ n $. Thus, for large $ n $, if the
array is sorted or nearly sorted, a StackOverflowException is
likely.
The most important thing we can do to improve the performance, in terms
of both running time and stack usage, is to be more careful about how we
choose the pivot element. We want to choose an element that partitions
the data elements roughly in half. The median element (i.e., the element
that belongs in the middle after the array is sorted) will therefore
give us the optimal split. It is possible to design an
$ O(n \lg n) $ algorithm that uses the median as the
pivot; however, the time it takes to find the median makes this
algorithm slower than merge sort in practice. It works much better to
find a quick approximation for the median.
The main technique for obtaining such an approximation is to examine
only a few of the elements. For example, we can use median-of-three
partitioning, which uses as its pivot element the median of the first,
middle, and last elements of the array portion we are sorting. An easy
way to implement this strategy is to place these three elements in an
array of size 3, then sort this array using insertion
sort. The element that
ends up at location 1 is then the used as the pivot.
We can improve on the above strategy by doing a case analysis of the
three values. If we do this, we don’t need a separate array — we just
find the median of three values, $ a $, $ b $, and $ c $, as follows:
- If $ a \lt b $:
- If $ b \lt c $, then $ b $ is the median.
- Otherwise, because $ b $ is the largest:
- If $ a \lt c $, then $ c $ is the median.
- Otherwise, $ a $ is the median.
- Otherwise, because $ b \leq a $:
- If $ a \lt c $, then $ a $ is the median.
- Otherwise, because $ a $ is the largest:
- If $ b \lt c $, then $ c $ is the median.
- Otherwise, $ b $ is the median.
The above algorithm is quite efficient, using at most three comparisons
and requiring no values to be copied other than the result if we
implement it in-line, rather than as a separate method (normally an
optimizing compiler can do this method inlining for us). It also
improves the sorting algorithm by tending to make the bad cases less
likely.
This version of quick sort gives good performance most of the time,
typically outperforming either heap
sort or merge
sort. However, it still
has a worst-case running time in $ O(n^2) $ and a worst-case
stack usage in $ O(n) $. Furthermore, it is unstable and does not
perform as well as insertion
sort on small or nearly
sorted data sets. In the next
section, we will show
how quick sort can be combined with some of the other sorting algorithms
to address some of these issues, including the bad worst-case
performance.
Hybrid Sorting Algorithms
Hybrid Sorting Algorithms
The best versions of quick
sort are competitive
with both heap sort and
merge sort on the vast
majority of inputs. However, quick sort has a very bad worst case —
$ O(n^2) $ running time and $ O(n) $ stack usage. By
comparison, both heap sort and merge sort have $ O(n \lg n) $
worst-case running time, together with a stack usage of $ O(1) $ for heap
sort or $ O(\lg n) $ for merge sort. Furthermore, insertion
sort performs better
than any of these algorithms on small data sets. In this section, we
look at ways to combine some of these algorithms to obtain a sorting
algorithm that has the advantages of each of them.
We will start with quick sort, which gives the best performance for most
inputs. One way of improving its performance is to make use of the fact
that insertion sort is
more efficient for small data sets. Improving the performance on small
portions can lead to significant performance improvements for large
arrays because quick sort breaks large arrays into many small portions.
Hence, when the portion we are sorting becomes small enough, rather than
finding a pivot and splitting, we instead call insertion sort.
An alternative to the above improvement is to use the fact that
insertion sort runs in $ O(n) $ time when the number of inversions is
linear in the number of array elements. To accomplish this, we modify
quick sort slightly so that instead of sorting the array, it brings each
element near where it belongs. We will refer to this modified algorithm
as a partial sort. After we have done the partial sort, we then sort
the array using insertion sort. The modification we make to quick sort
to obtain the partial sort is simply to change when we stop sorting. We
only sort portions that are larger than some threshold — we leave other
portions unsorted.
Suppose, for example, that we choose a threshold of $ 10 $. Once the partial
sort reaches an array portion with nine or fewer elements, we do nothing
with it. Note, however, that these elements are all larger than the
elements that precede this portion, and they are all smaller than the
elements that follow this portion; hence, each element can form an
inversion with at most eight other elements — the other elements in the
same portion. Because each inversion contains two elements, this means
that there can be no more than $ 4n $ inversions in the entire array once
the partial sort finishes. The subsequent call to insertion sort will
therefore finish the sorting in linear time.
Both of the above techniques yield performance improvements over quick
sort alone. In fact, for many years, such combinations of an optimized
version of quick sort with insertion sort were so efficient for most
inputs that they were the most commonly-used algorithms for
general-purpose sorting. On modern hardware architectures, the first
approach above tends to give the better performance.
Nevertheless, neither of the above approaches can guarantee
$ O(n \lg n) $ performance — in the worst case, they are all
still in $ O(n^2) $. Furthermore, the bad cases still use
linear stack space. To overcome these shortfalls, we can put a limit on
the depth of recursion. Once this limit is reached, we can finish
sorting this portion with an $ O(n \lg n) $ algorithm such as
heap sort. The idea is to
pick a limit that is large enough that it is rarely reached, but still
small enough that bad cases will cause the alternative sort to be
invoked before too much time is spent. A limit of about $ 2 \lg n $,
where $ n $ is the size of the entire array, has been suggested. Because
arrays in C# must have fewer than $ 2^{31} $ elements, this value
is always less than $ 62 $; hence, it is also safe to use a constant for the
limit. The resulting algorithm has a worst-case running time in
$ O(n \lg n) $ and a worst-case stack usage of $ O(\lg n) $.
This logarithmic bound on the stack usage is sufficient to avoid a
StackOverflowException.
The combination of quick sort using median-of-three
partitioning with
insertion sort for small portions and heap sort when the recursion depth
limit is reached is known as introsort (short for introspective
sort). Other improvements exist, but we will not discuss them here. The
best versions of introsort are among the best sorting algorithms
available, unless the array is nearly sorted. Of course, if the data
won’t fit in an array, we can’t use introsort — we should use external
merge sort
instead. Furthermore, like quick sort and heap sort, introsort is not
stable. When a stable sort is not needed, however, and when none of the
above special cases applies, introsort is one of the best choices
available.
Sorting Strings
Sorting Strings
We conclude our discussion of sorting with a look at a sorting algorithm
designed specifically for sorting multi-keyed data. In such data there
is a primary key, a secondary key, and so on. We want to sort the data
so that element a precedes element b if:
- the primary key of a is less than the primary key of b;
- or their primary keys are equal, but the secondary key of a is
less than the secondary key of b;
- etc.
An example of multi-keyed data is strings. The first character of a
string is its primary key, its second character is its secondary key,
and so on. The only caveat is that the strings may not all have the same
length; hence, they may not all have the same number of keys. We
therefore stipulate that a string that does not have a particular key
must precede all strings that have that key.
One algorithm to sort multi-keyed data is known as multi-key quick
sort. In this section, we will describe multi-key quick sort as it
applies specifically to sorting strings; however, it can be applied to
other multi-keyed data as well.
One problem with sorting strings using a version of quick sort described
in “Split Sorts” is
that string comparisons can be expensive. Specifically, they must
compare the strings a character at a time until they reach either a
mismatch or the end of a string. Thus, comparing strings that have a
long prefix in common is expensive. Now observe that quick sort operates
by splitting the array into smaller and smaller pieces whose elements
belong near each other in the sorted result. It is therefore common to
have some pieces whose elements all begin with the same long prefix.
Multi-key quick sort improves the performance by trying to avoid
comparing prefixes after they have already been found to be the same
(though the suffixes may differ). In order to accomplish this, it uses
an extra int parameter k such that all the strings being sorted
match in their first k positions (and by implication, all strings have
length at least k). We can safely use a value of 0 in the initial
call, but this value can increase as recursive calls are made.
Because all strings begin with the same prefix of length k, we can
focus on the character at location k (i.e., following the first k
characters) of each string. We need to be careful, however, because some
of the strings may not have a character at location k. We will
therefore use an int to store the value of the character at location
k of a string, letting $ -1 $ denote the absence of a character at that
location. We can also let $ -2 $ denote a null element, so that these elements are placed before all non-null elements in the sorted result.
The algorithm then proceeds a lot like those described in “Split
Sorts”. If the number of
elements being sorted is greater than $ 1 $, a pivot element p is found.
Note that p is not a string, but an int representing a
character at location k, as described above. The elements are then
partitioned into groups of strings whose character at location k is
less than p, equal to p, or greater than p, respectively.
After these three groups are formed, the first and third group are
sorted recursively using the same value for k. Furthermore, the second
group may not be completely sorted yet — all we know is that all strings
in this group agree on the first k + 1 characters. Thus, unless
p is negative (indicating that either these strings are all null or they all have length k, and
are therefore all equal), we need to recursively sort this group as
well. However, because we know that the strings in this group all agree
on the first k + 1 characters, we pass k + 1 as the last
parameter.
One aspect of this algorithm that we need to address is whether the
recursion is valid. Recall that when we introduced
recursion, we stated that
in order to guarantee termination, all recursive calls must be on
smaller problem instances, where the size of a problem instance is given
by a nonnegative integer. In the algorithm described above, we might
reach a point at which all of the strings being sorted match in location
k. In such a case, the second recursive call will contain all of the
strings.
By being careful how we define the size of the problem instance,
however, we can show that this recursion is, in fact, valid.
Specifically, we define the size of the problem instance to be the
number of strings being sorted, plus the total number of characters
beginning at location k in all strings being sorted. Because there is
at least one string containing p at location k, the number of
strings in both the first and the third recursive call must be smaller,
while the total number of characters beginning at location k can be no
larger. Because k increases by $ 1 $ in the second recursive call, the
total number of characters past this location must be smaller, while the
number of strings can be no larger. Hence, the size decreases in all
recursive calls.
The fact that we are doing recursion on the length of strings, however,
can potentially cause the runtime stack to overflow when we are sorting
very long strings. For this reason, it is best to convert the recursive
call on the second group to a loop. We can do this by changing the
if-statement that controls whether the splitting will be done into a
while-loop that iterates as long as the portion being sorted is
large enough to split. Then at the bottom of the loop, after doing
recursive calls on the first and third parts, we check to see if p is
$ -1 $ — if so, we exit the loop. Otherwise, we do the following:
- increment
k; - change the index giving the start of the portion we are sorting to
the beginning of the second part; and
- change the length of the portion we are sorting to the length of the
second part.
The next iteration will then sort the second part.
This algorithm can be combined with insertion
sort and heap
sort, as was done for
introsort in the previous
section. However, we
should also modify insertion sort and heap sort to use the information
we already have about equal prefixes when we are comparing elements.
Specifically, rather than comparing entire strings, we should begin
comparing after the equal prefix. Because of the way multi-key quick
sort does comparisons, the result tends to perform better than the
single-key versions, assuming similar optimizations are made; however,
cutoffs for running insertion sort and/or heap sort may need to be
adjusted.