Path Finding Algorithm
The pseudocode for finding the initial path using the stack is shown below. We assume the enclosing class has already defined a stack called myStack and the datatype called Cell, which represents the squares in the maze. The algorithm also uses three helper functions as described below:
getNextCell(maze, topCell): computes the next cell based on our current cell’s location and direction;incrementDirection(topCell): increments a cell’s direction attribute following the clockwise sequence of up, right, down, left, and then finally done, which means that we’ve tried all directions; andvalid(nextCell): determines if a cell is valid. A cell is invalid if it is “blocked”, is outside the boundaries of the maze, or is in the current path (i.e., if it exists in the stack).
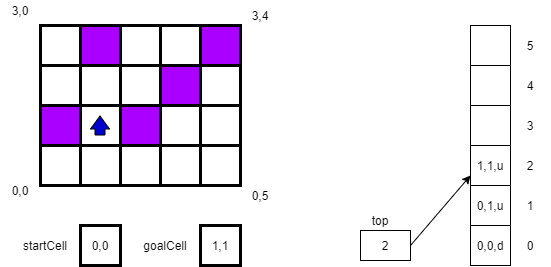
The parameters of findPath are a 2-dimensional array called maze, the startCell and the endCell. The algorithm begins by pushing the startCell onto myStack. The cell at the top of the stack will always represent our current cell, while the remaining cells in the stack represent the path of cells taken to reach the current cell.
Next, we enter a loop, where we will do the bulk of the work. We peek at the cell on the top of the stack in order to use it in our computations. If the topCell is equal to our goalCell, then we are done and return true indicating that we have found a path to the goal.
If we are not at our goal, we check to see if we have searched all directions from the current cell. If that is the case, then the direction attribute of the topCell will have been set to done. If the direction attribute of topCell is equal to done, then we pop the topCell of the stack, effectively leaving that cell and returning to the next cell in the stack. This is an algorithmic technique called backtracking.
function FINDPATH(MAZE, STARTCELL, GOALCELL)
MYSTACK.PUSH(STARTCELL);
loop while !MYSTACK.ISEMPTY()
TOPCELL = MYSTACK.PEEK()
if TOPCELL equals GOALCELL
return true
if TOPCELL.GETDIRECTION() = done then
MYSTACK.POP()
else
NEXTCELL = GETNEXTCELL(MAZE, TOPCELL)
INCREMENTDIRECTION(TOPCELL)
if VALID(MAZE, NEXTCELL) then
if MYSTACK.ISFULL() then
MYSTACK.DOUBLECAPACITY();
end if
MYSTACK.PUSH(NEXTCELL)
end if
end if
end while
return false
end functionHowever, if we have not searched in all directions from topCell, we will try to explore a new cell (nextCell) adjacent to the topCell. Specifically, nextCell will be the adjacent cell in the direction stored by the direction attribute. We then increment the direction attribute of the topCell so if we end up backtracking, we will know which direction to try next.
Before we push the nextCell onto the stack, we must first check to see if it’s a valid cell by calling the helper function valid. A cell is valid if it is open to be explored. A cell is invalid if it is “blocked,” is outside the boundaries of the maze, or is in the current path (i.e., if it exists in the stack). To help us determine if a cell is in the stack, we will need to extend our stack operations to include a find operation that searches the stack while leaving its contents intact. You will get to implement this operation in your project.
If nextCell is valid, we then check to make sure that the stack is not already full. If it is, we simply call doubleCapacity and continue on our way. Then we push nextCell onto myStack so it will become our next topCell on the next pass through the loop.
After we have explored all possible paths through the maze, the loop will eventually end, and the operation will return false indicating no path was found. While this is not the most efficient path finding algorithm, it is a good example of using stacks for backtracking. Also, if we do find a path and return, the path will be saved in the stack. We can then use the previous pseudocode for retracing our steps and going back to the startCell.